
参考
以下是证据理论(Dempster-Shafer Theory,DST)的实现过程的详细解释,基于图中内容整理为四个核心步骤:
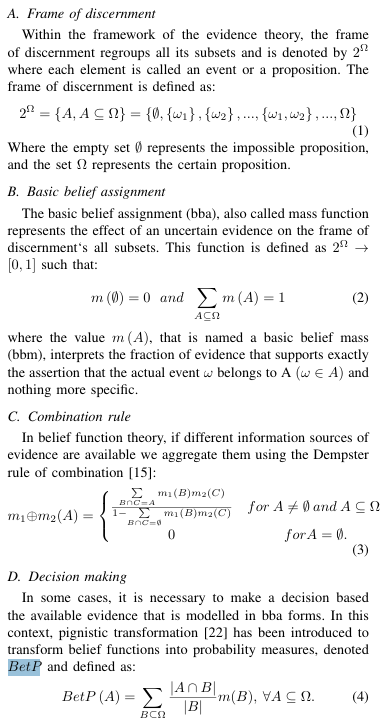
1. 建立辨别框架(Frame of Discernment)
目的:定义所有可能的命题集合,作为证据推理的基础。
实现步骤:
- 定义Ω:确定一个互斥且完备的基本事件集合,例如Ω = {A, B, C}。
- 生成幂集:构建Ω的所有子集(包括空集和全集),即2^Ω。例如:
- 意义:每个子集代表一个可能的事件或命题,空集表示不可能事件,全集Ω表示确定性命题。
2. 定义基本信念分配(Basic Belief Assignment, bba)
目的:量化证据对每个命题的支持程度。
实现步骤:
- 分配质量函数:为每个子集分配一个质量值,满足:
- 示例:
- 若传感器1检测到目标,其证据可表示为:
(表示60%支持A,40%不确定)。 - 若传感器2检测到目标,其证据可表示为:
。

- 若传感器1检测到目标,其证据可表示为:
3. 组合证据(Dempster组合规则)
目的:聚合多个独立证据源的信息。
实现步骤:
- 计算联合质量函数:对两个质量函数和,组合后的质量函数为:
其中,表示证据间的冲突程度。
- 示例:
组合和:- 冲突部分(因,无冲突)。
- 归一化后:
,
,
。
4. 决策制定(Pignistic变换)
目的:将质量函数转化为概率分布,支持最终决策。
实现步骤:
- 计算Pignistic概率:对每个单元素命题,概率为:
- 示例:
根据组合后的,计算:最终选择概率最高的命题作为决策结果。
关键公式总结
| 步骤 | 公式 |
|---|---|
| Dempster组合规则 | $$m(A) = \frac{\sum_{B \cap C = A} m_1(B)m_2©}{1 - K}$$ |
| Pignistic变换 | $$BetP(A) = \sum_{B \supseteq A} \frac{m(B)}{ |
应用场景
- 多传感器信息融合(如目标识别、自动驾驶)。
- 风险评估与决策(如医疗诊断、金融预测)。
- 人工智能推理(处理不确定性知识的专家系统)。
注意事项:
- 当证据高度冲突()时,Dempster规则可能失效,需改用其他组合规则(如Yager规则或PCR6)。
- 辨别框架的设计需保证完备性和互斥性,否则可能影响推理结果。